 |
||||
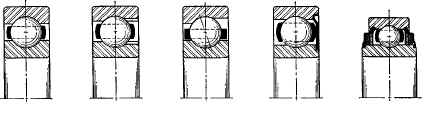
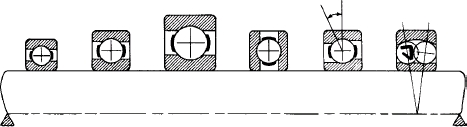
| (a) | (b) | (c) | (d) | (e) |
| Deep Groove | Filled notch | Angular Contact | Shielded | Sealed |
|
|
|
||||
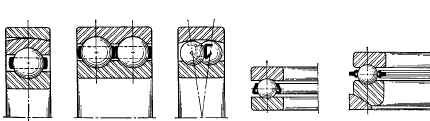
| (a) | (b) | (c) | (d) | (e) |
| Deep Groove | Filled notch | Angular Contact | Shielded | Sealed |
 |
||||
| (f) | (g) | (h) | (i) | (j) |
| External self- aligning | Double Row | Self- aligning | Thrust | Self-aligning thrust |
 |
|||
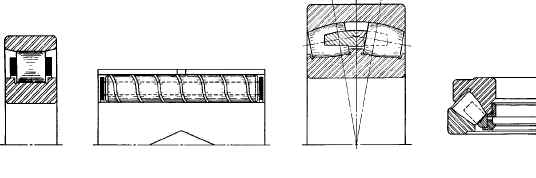
| (a) | (b) | (c) | (d) |
| plain roller | helical roller | self-aligning spherical roller | spherical roller thrust |
 |
|||
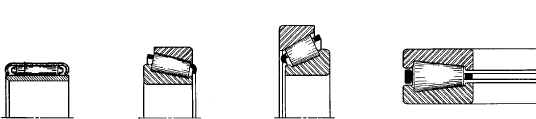
| (e) | (f) | (g) | (h) |
| needle | tapered roller | tapered roller thrust | steep angle tapered roller |
|
|
|||
|
|
 |
|||||
| (a) | (b) | (c) | (d) | (e) | (f) |
| 100 series extra light | 200 series light | 300 series medium | Axial thrust bearing | Axial contact bearing | self aligning bearing |
|
The radial bearing is able to carry considerable amount of axial thrust. However, when the load is directed entirely along the axis, the trust type of bearing should be used. The angular contact bearing will take care of both radial and axial loads. The self aligning ball bearing will take care of large amounts of angular misalignment. An increase in radial capacity may be secured by using rings with deep grooves or by employing a double-row radial bearing |
||
|
|
 |
|
|
|
||